面向 3D 盒子的交并比:一种新算法
作者:Georgia Gkioxari
实现:Georgia Gkioxari 和 Nikhila Ravi
描述
盒子的交并比 (IoU) 广泛用作目标检测中的评估指标(1,2)。在 2D 中,IoU 通常应用于轴对齐的盒子,即边缘平行于图像轴的盒子。在 3D 中,盒子通常不是轴对齐的,并且可以以任何方式在世界中定向。我们引入了一种新算法,该算法计算两个面向 3D 盒子的精确 IoU。
我们的算法基于一个简单的观察结果,即两个面向 3D 盒子 box1 和 box2 的交集是一个凸多面体(2D 中的凸 n 边形),其中 n > 2 由连接的平面单元组成。在 3D 中,这些平面单元是 3D 三角面。在 2D 中,它们是 2D 边缘。每个平面单元严格属于 box1 或 box2。我们的算法通过迭代每个盒子的边来找到这些单元。
- 对于
box1中的每个 3D 三角面e,我们检查e是否在box2内部。 - 如果
e不在内部,则将其丢弃。 - 如果
e在内部或部分在内部,则box2内部的e部分将添加到构成最终交集形状的单元中。 - 我们对
box2重复此操作。
下面,我们展示了我们算法在 2D 面向盒子的情况下的可视化。
请注意,当盒子的单元 e 部分在内部 box 时,e 会分解成更小的单元。在 2D 中,e 是一个边缘,并分解成更小的边缘。在 3D 中,e 是一个 3D 三角面,并且被它与之相交的 box 的平面裁剪成更多更小的面。这是 2D 和 3D 算法之间唯一的根本区别。
与其他算法的比较
当前用于 3D 盒子 IoU 的算法依赖于粗略的近似值或做出盒子假设,例如,它们限制了 3D 盒子的方向。Objectron 对先前工作的局限性进行了很好的讨论。Objectron 引入了一种用于面向 3D 盒子的精确 IoU 计算的优秀算法。Objectron 的算法使用Sutherland-Hodgman 算法计算两个盒子的交点。交集形状由交点的凸包形成,使用Qhull 库。
我们的算法相对于 Objectron 的算法有几个优点
- 我们的算法也计算交点,类似于 Objectron,但此外还存储点所属的平面单元。这消除了对凸包计算的需要,凸包计算为
O(nlogn)并依赖于第三方库,该库通常会以无法描述的错误消息崩溃。 - Objectron 的实现假设盒子与轴对齐之间存在旋转关系。我们的算法和实现没有这样的假设,适用于任何 3D 盒子。
- 我们的实现支持批处理,而 Objectron 假设
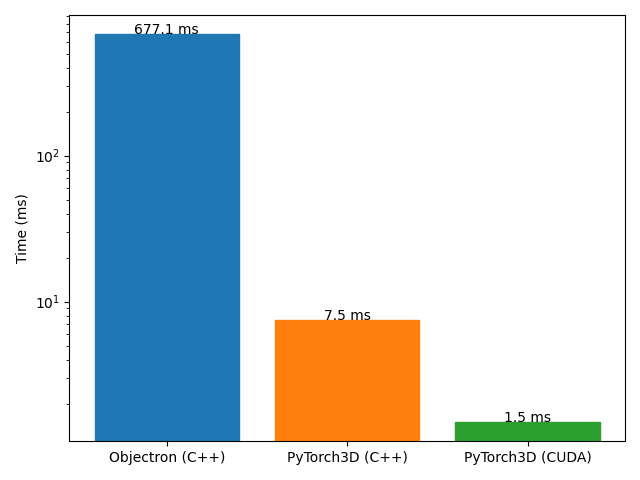
box1和box2的输入为单个元素。 - 我们的实现易于并行化,事实上,我们提供了一个自定义的 C++/CUDA 实现,其速度比 Objectron 快 450 倍。
下面我们比较了 Objectron(使用 C++)和我们的算法(使用 C++ 和 CUDA)的性能。我们针对目标检测中的一个常见用例进行基准测试,其中 boxes1 包含 M 个预测,boxes2 包含图像中 N 个地面实况 3D 盒子,并计算 MxN IoU 矩阵。我们报告 M=N=16 的时间(以毫秒为单位)。
用法和代码
from pytorch3d.ops import box3d_overlap
# Assume inputs: boxes1 (M, 8, 3) and boxes2 (N, 8, 3)
intersection_vol, iou_3d = box3d_overlap(boxes1, boxes2)
有关更多详细信息,请阅读iou_box3d.py。
请注意,我们的实现目前不可微。我们计划尽快添加梯度支持。
我们还包括了广泛的测试,将我们的实现与 Objectron 和 MeshLab 进行比较。
引用
如果您使用我们的 3D IoU 算法,请引用 PyTorch3D
@article{ravi2020pytorch3d,
author = {Nikhila Ravi and Jeremy Reizenstein and David Novotny and Taylor Gordon
and Wan-Yen Lo and Justin Johnson and Georgia Gkioxari},
title = {Accelerating 3D Deep Learning with PyTorch3D},
journal = {arXiv:2007.08501},
year = {2020},
}